
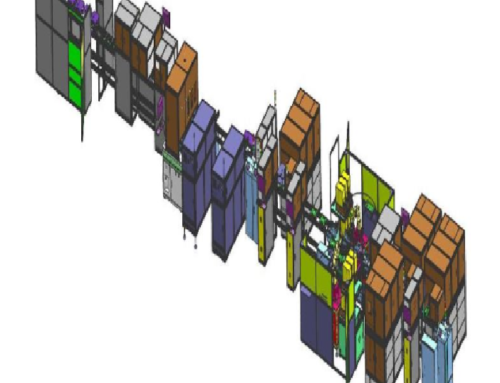
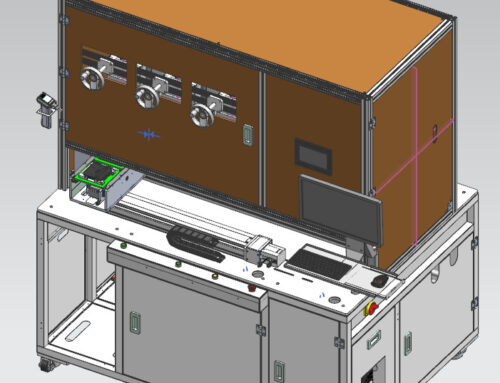
Hệ thống của chúng tôi sử dụng camera trực quan để phát hiện PCB, sau đó, vị trí của PCB sẽ được gửi tới Robot, vì vậy robot có thể đưa đúng PCB vào máy SMT. Sau khi kết thúc công đoạn này, robot sẽ đưa bảng mạch PCBA vào khay thành phẩm.
Thời gian chu kì cho 1 quy trình là 15 giây.
Our system uses vision camera to detect PCB. After that, the location of the PCB will be sent to the Robot, so that the robot can pick the correct PCB into the SMT machine. After finishing this stage, the robot will put the PCBA into the finished tray.
Cycle time for 1 process is: 15s


{kind=link}
{kind=link}
{kind=link}
{kind=link}